°°°°◊∑ łŌ
°°°°Õ£“ĽÕ£Ņī“ĽŅī¬ż¬ż◊∑
°°°°ļŃőř“…ő £¨’‚ «»ňņŗĪĺńÍ∂»◊Ó◊≥ĻŘĶń°įŐęŅ’īů∆¨°Ī÷ģ“Ľ°£
°°°°…Ů÷ŘįňļŇ∑…ī¨‘ű—ýľ”ňŔ£Ņ‘ű—ý…≤≥Ķ£ŅňŁ”Ž∆Ż≥ĶĶńĶō√ś◊∑Ľų°Ę∑…ĽķĶńŅ’÷–ľ””ÕĺŅĺĻ”– ≤√ī≤ĽÕ¨£Ņ‘ŕĺŗĶō«Ú200ĻęņÔ“‘Õ‚ĶńĻžĶņ…Ō£¨…Ů÷ŘįňļŇ»Áļő◊∑…ŌŐžĻ¨“ĽļŇ≥…ő™ĹĽĽŠ∂‘Ĺ”«į◊ÓīůĶń–ŁńÓ°£
°°°°‘ŕ÷–Ļķ‘ō»ňļĹŐžĻ§≥Ő◊‹…Ťľ∆ ¶÷‹Ĺ®∆ĹĶń—ŘņÔ£¨°į◊∑łŌ°ĪĶń◊®“Ķ ű”Ô”¶ł√ «°įĪšĻž°Ī£¨’ŻłŲ◊∑łŌĻż≥ŐĺÕ «≤Ľ∂ŌĪšĻžĶńĻż≥Ő°£‘≠ņŪļ‹ľÚĶ•£ļ∑…––∆ųĶńĻžĶņ‘ĹĶÕ£¨ňŔ∂»‘ĹłŖ°£ňý“‘£¨ő™ŃňĪ£÷§…Ů÷ŘįňļŇ∑…ī¨”–“ĽłŲ◊∑łŌňŔ∂»£¨∆š∑Ę…š»ŽĻžĶńĻžĶņ◊‘»Ľ“™‘ŕŐžĻ¨“ĽļŇĶńŌ¬∑Ĺ°£
°°°°°į…Ů÷ŘįňļŇ◊∑łŌŐžĻ¨“ĽļŇ≤Ę∑«»Á≥ĶŃĺ◊∑ĽųĽÚŅ’÷–ľ””Õń«—ý£¨Ķ•īŅŅŅ“ż«śňś“‚ľ”ňŔľűňŔń«√īľÚĶ•°£°Ī‘ō»ňļĹŐžĻ§≥Ő≤‚ŅōÕ®–ŇŌĶÕ≥÷ų»ő…Ťľ∆ ¶¬¨ŃĘ≥£łśňŖľ«’Ŗ£¨”…”ŕÕ¨“ĽłŲĻžĶņĶńňŔ∂» «ĻŐ∂®Ķń£¨ňŔ∂»“ĽĪšĻžĶņĪō»ĽłńĪš£¨ňý“‘£¨ĻžĶņĪšĶÕŌŗĶĪ”ŕ°įľ”ňŔ°Ī£¨ŐßłŖĻžĶņŌŗĶĪ”ŕ°į…≤≥Ķ°Ī°£’‚÷÷∂ņ”–ĶńŐęŅ’◊∑łŌ∑Ĺ Ĺ£¨”–“‚ňľ÷ģī¶‘ŕ”ŕ£¨°į≤Ľ «‘Ĺ◊∑‘ĹŅž£¨∂Ý «‘Ĺ◊∑‘Ŭż°Ī°£
°°°°∆š Ķļ‹ļ√ņŪĹ‚£¨ňś◊Ň“ĽīőīőĪšĻž£¨…Ů÷ŘįňļŇĶńĻžĶņ÷ū≤ĹŐßłŖĶĹŐžĻ¨“ĽļŇĶńĻžĶņłŖ∂»£¨ňŁĶńňŔ∂»“≤ĺÕ‘Ĺņī‘Ŭż£¨÷ūĹ•ľűňŔĶĹ”ŽŐžĻ¨“ĽļŇÕ¨“ĽłŲňŔ∂»°£°į‘Ĺ◊∑‘ŬżĶńļ√ī¶Ō‘∂Ý“◊ľŻ£¨Ņ…“‘”ŽńŅĪÍ ĶŌ÷ő¬»Š∂‘Ĺ”°£°Ī¬¨ŃĘ≥£ňĶ°£
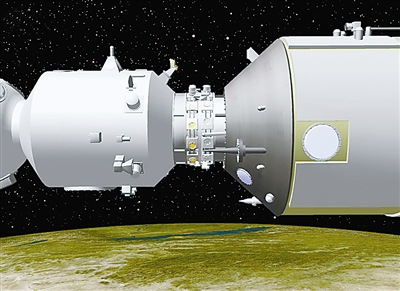
°°°°’żňýőĹ°į”ŻňŔ‘Ú≤ĽīÔ°Ī£¨’‚ «“Ľīő’ś’żĽý”ŕ◊Ó÷’–ßĻŻĶń◊∑łŌ°£ő™ŃňļÕŐžĻ¨“ĽļŇ∂‘…Ō°į«Ô≤®°Ī£¨»∑Ī£ĪňīňĶńŌŗ∂‘≤‚ŃŅÕ®–Ň’ż≥£°įĻĶÕ®°Ī£¨÷–ĻķļĹŐž»ňő™…Ů÷ŘįňļŇ…Ť÷√Ńň4łŲÕ£≤īĶ„£¨»∑Ī£◊∑Ķ√Ņň÷∆°Ę◊∑Ķ√ņšĺ≤°Ę◊∑Ķ√Ĺų…ų°£
°°°°4łŲÕ£≤īĶ„∑÷ĪūĺŗņŽŐžĻ¨“ĽļŇ5000√◊°Ę400√◊°Ę140√◊°Ę30√◊£¨ī¶‘ŕŐžĻ¨“ĽļŇĶńÕ¨ĻžĶņłŖ∂»°£√ŅĶĪĶ÷īÔÕ£≤īĶ„Ķńň≤ľš£¨…Ů÷ŘįňļŇĺÕļÕŐžĻ¨“ĽļŇī¶‘ŕÕ¨“ĽĻžĶņłŖ∂»£¨Ōŗ∂‘ňŔ∂»ő™Ń„£¨…Ů÷ŘįňļŇ“™‘ŕ’‚łŲ ĪļÚ°įÕ£“ĽÕ££¨Ņī“ĽŅī°ĪŃň°£
°°°° ◊Ō»£¨“™Ņī“ĽŅīłų◊‘Ķń∑…––◊īŐ¨ «∑Ů’ż≥££¨»Ľļů«–ĽĽŌŗ∂‘≤‚ŃŅŅō÷∆ń£ Ĺ£¨į—ŃĹłŲ∑…––∆ųĶńŌŗ∂‘◊ňŐ¨Ķų’ŻĶĹņŪŌŽ◊īŐ¨°£∑…ī¨‘ŕÕ£≤īĶ„ĶńÕ£≤ī Īľš≥Ő–ÚņÔ‘§Ō»…Ť∂®ļ√Ńň£¨‘ÁĶĹŃňĺÕ∂ŗĶ»“ĽĽŠ∂ý£¨ÕŪĶĹŃňĺÕ…ŔĶ»“ĽĽŠ∂ý°£“ĽĶ©≥ŲŌ÷Ļ ’Ō£¨Ņ…“‘‘ŕ’‚∂ýĶ»īż£¨…ű÷ŃÕňĽōĶĹ…Ō“ĽłŲÕ£≤īĶ„£¨÷ĪĶĹĻ ’Ōī¶ņŪÕÍĪŌ°£
°°°°»ÁĻŻ“Ľ«–’ż≥££¨…Ů÷ŘįňļŇĺÕĽŠĹĶĶÕĻžĶņłŖ∂»ľŐ–ÝłŌ¬∑£¨łŌŌÚŌ¬“ĽłŲÕ£≤īĶ„£¨–ő≥…≤®ņň Ĺ◊∑łŌĻžľ£°£
°°°°Ō÷‘ŕ£¨ĺ≠Ļż“Ľ∑¨ŅŐĻ«√ķ–ńĶń◊∑łŌļÕńżÕŻ£¨ŐžĻ¨“ĽļŇ“—ĺ≠ĹŁ‘ŕ—Ř«į£¨…Ů÷ŘįňļŇĶń3į—≤∂ĽŮňÝ“—ĺ≤ĺ≤…ž≥Ų£¨∆ŃŌĘĶ»īżĺ™–ń∂Į∆«Ķń∂‘Ĺ”“ĽŅŐ°£
°°°°”Ķ Īß
°°°°Õ¨ļŰőŁĻ≤√Ł‘ň–ńѨ–ń
°°°°ľ§∂Į»ň–ńĶń“ĽŅŐĶĹņīŃň°£’‚“ĽŅŐ£¨”Ž∆šňĶ «Ōŗő«£¨≤Ľ»ÁňĶ «”ĶĪß°£
°°°°‘ŕ√£√£ŐęŅ’£¨łŖňŔ‘ň◊™ĶńňŁ√«‘ŕń«“ĽŅŐņ≠◊°Ńň∂‘∑Ĺ£¨≤ĘĹŰĹŰŌŗ”Ķ°£
°°°°ňŁ√«”ĶĪßĪňīňĶń°į ÷ĪŘ°Ī «°į“žŐŚÕ¨ĻĻ÷‹ĪŖ°Ī Ĺ∂‘Ĺ”ĽķĻĻ°£’‚łŲŅį≥∆÷–ĻķļĹŐž ∑…Ō◊Ółī‘”ĶńŅ’ľšĽķĻĻ£¨”…≥…«ß…ŌÕÚłŲŃ„≤ŅľĢ◊ť≥…£¨ĹŲĹŲ÷Š≥–ļÕ≥›¬÷ĺÕ”–Ńý∆ŖįŔłŲ°£°į“žŐŚÕ¨ĻĻ°Ī «÷ł…Ů÷ŘįňļŇļÕŐžĻ¨“ĽļŇ…ŌĶń∂‘Ĺ”ĽķĻĻ≤…”√Õ¨—ýĹŠĻĻ£Ľ°į÷‹ĪŖ Ĺ°Ī «÷łĽķĻĻ≤Ľ…Ť÷√‘ŕ÷–ľš£¨∂Ý «…Ť÷√‘ŕ÷‹ĪŖ°£
°°°°ĺ›…Ů÷ŘįňļŇ∑…ī¨°ĘŐžĻ¨“ĽļŇńŅĪÍ∑…––∆ų◊‹…Ťľ∆ ¶’Ňįōť™Ĺť…‹£ļ°į’‚÷÷∂‘Ĺ”ĽķĻĻĶń”ŇĶ„ «Ľ•ĽĽ–‘£¨∂‘Ĺ”ļůÕ®Ķņ≥©Õ®£¨∂‘Ĺ”ĽķĻĻĶńѨŔĽ∑÷Īĺ∂ĹŌīů≥–‘ōń‹Ń¶ĹŌīů£¨ĺ≠Ļż ĶĪłńĹÝŅ…“‘ ”¶ żįŔ∂÷ĶńļĹŐž∆ų∂‘Ĺ”°£°Ī
°°°°∂‘Ĺ”ĽķĻĻļň–ń≤ŅľĢ”…3į—°į≤∂ĽŮňÝ°ĪļÕ12į—°įĹŠĻĻňÝ°Ī◊ť≥…£¨…Ů÷ŘįňļŇļÕŐžĻ¨“ĽļŇłų”–ÕÍ»ę∂‘≥∆Ķń“ĽŐ◊°£’ż≥£«ťŅŲŌ¬£¨…Ů÷ŘįňļŇŌ»÷ų∂Į…ž≥Ų°į≤∂ĽŮňÝ°Ī£¨“ĽĶ©Ļ“◊°ŐžĻ¨“ĽļŇ£¨ĺÕŌŮňÝ√Ň“Ľ—ýňÝ◊°Ńň°£”…īň£¨ŃĹłŲ∑…––∆ų ĶŌ÷Ńň◊Ó≥űĶńѨŔ£¨Õ¨ ĪňŁ√«ńŕ≤ŅĶńĶÁīŇ◊ŤŃ¶◊‘∂Į∆ų“≤ÕÍ≥…ŃňŃĹłŲ∑…––∆ų÷ģľšĶńĽļ≥ŚőŁń‹ļÕ◊ňŐ¨–£’ż°£
°°°°“ĽĶ©◊ňŐ¨–£’żÕÍĪŌ£¨…Ů÷ŘįňļŇĽŠ…ž≥Ųņŗň∆”ŕĽū≥Ķ≥ĶŌŠĶńѨŔĻ“Ļ≥£¨Ļ≥◊°ŐžĻ¨“ĽļŇ£¨◊ÓļůŃĹĪŖĶń12į—°įĹŠĻĻňÝ°ĪĹŰĹŰňÝ‘ŕ“Ľ∆ū°£ľłļűÕ¨ Ī£¨3į—≤∂ĽŮňÝīÚŅ™£¨≤Ęńŕ∑≠ĶĹ‘≠ ľőĽ÷√£¨ŃŰ≥Ų÷Īĺ∂80ņŚ√◊ĶńŃ¨Ĺ”Õ®Ķņ£¨őīņīĶńļĹŐž‘ĪĹęÕ®Ļż’‚łŲÕ®ĶņĹÝ»ŽĶĹŐžĻ¨“ĽļŇ°£
°°°°»Ľ∂Ý£¨īň ĪīňŅŐ»‘≤Ľ «ň…Ņŕ∆ÝĶń ĪļÚ°£…Ů÷ŘįňļŇ“—ĹÝ»ŽÕ£ŅŅ◊īŐ¨£¨ŐžĻ¨“ĽļŇĶń∆ŰŅō≥…ő™«ß寓Ľ∑ĘĶńĻōľŁ ¬ľĢ°£»ÁĻŻ≤Ľń‹∆ŰŅō£¨ ĶŌ÷ŃĹłŲ∑…––∆ų◊ňŐ¨°Ęń‹‘ī°Ę–ŇŌĘ“‘ľįńŕ≤ŅĽ∑ĺ≥Ķń“ĽŐŚŅō÷∆£¨ňÝĹŰĶń∑…––∆ų◊ťļŌŐŚĹ꼊ī¶”ŕ ßŅōĶń∑≠ĻŲ◊īŐ¨£¨∑«≥£ő£Ō’°£
°°°°ńŅĪÍ∑…––∆ų∆ŰŅō£¨“‚ő∂◊Ň‘ŕ√£√£ŐęŅ’ĹŰĹŰ”ĶĪßĶńŃĹłŲ∑…––∆ų’ś’ż°įÕ¨ļŰőŁ°ĘĻ≤√Ł‘ň°Ę–ńѨ–ń°ĪŃň°£
°°°° ◊Ō»“™≤ĘÕÝĻ©ĶÁ£¨ ĶŌ÷ń‹‘īĶńÕ≥“Ľ£Ľ∆šīő£¨”…ŐžĻ¨“ĽļŇ≤…ľĮ…Ů÷ŘįňļŇ∑…ī¨Ķń◊īŐ¨£¨Õ¨ Ī∑ĘňÕ÷łŃÓ ĶŌ÷–ŇŌĘĶńÕ≥“Ľ£Ľ‘Ŕīő£¨łÝ∂‘Ĺ”Õ®Ķņ≥š—Ļ£¨ ĶŌ÷ńŕ≤Ņ∆ÝŐŚĽ∑ĺ≥ĶńÕ≥“Ľ°≠°≠ĶĪ◊ťļŌŐŚÕͻꔅńŅĪÍ∑…––∆ųŅō÷∆ Ī£¨“‚ő∂◊Ňő“√«∂‘◊ťļŌŐŚŅō÷∆ľľ űĶńÕĽ∆∆°£